DICA DELMIA V5 – DEVICE BUILDING
Nessa semana voltaremos a abordar ferramentas do DELMIA V5, de forma complementar ao que já utilizamos no CATIA V5/ ENOVIA V5 dentro do módulo de DMU KINEMATICS.
O workbench DEVICE BUILDING nos permitirá criar mecanismos utilizando os mesmos comandos de JOINTS que temos no DMU Kinematics do CATIA V5, com algumas ferramentas que nos permitem criar algumas regras a mais, como por exemplo:
Home Positions: Essa ferramenta permite que criemos estágios intermediários no percurso da JOINT do devido mecanismo, criando assim estágio de operação de uma ferramenta por exemplo. Para utilizar essa ferramenta basta seguir os passos abaixo:
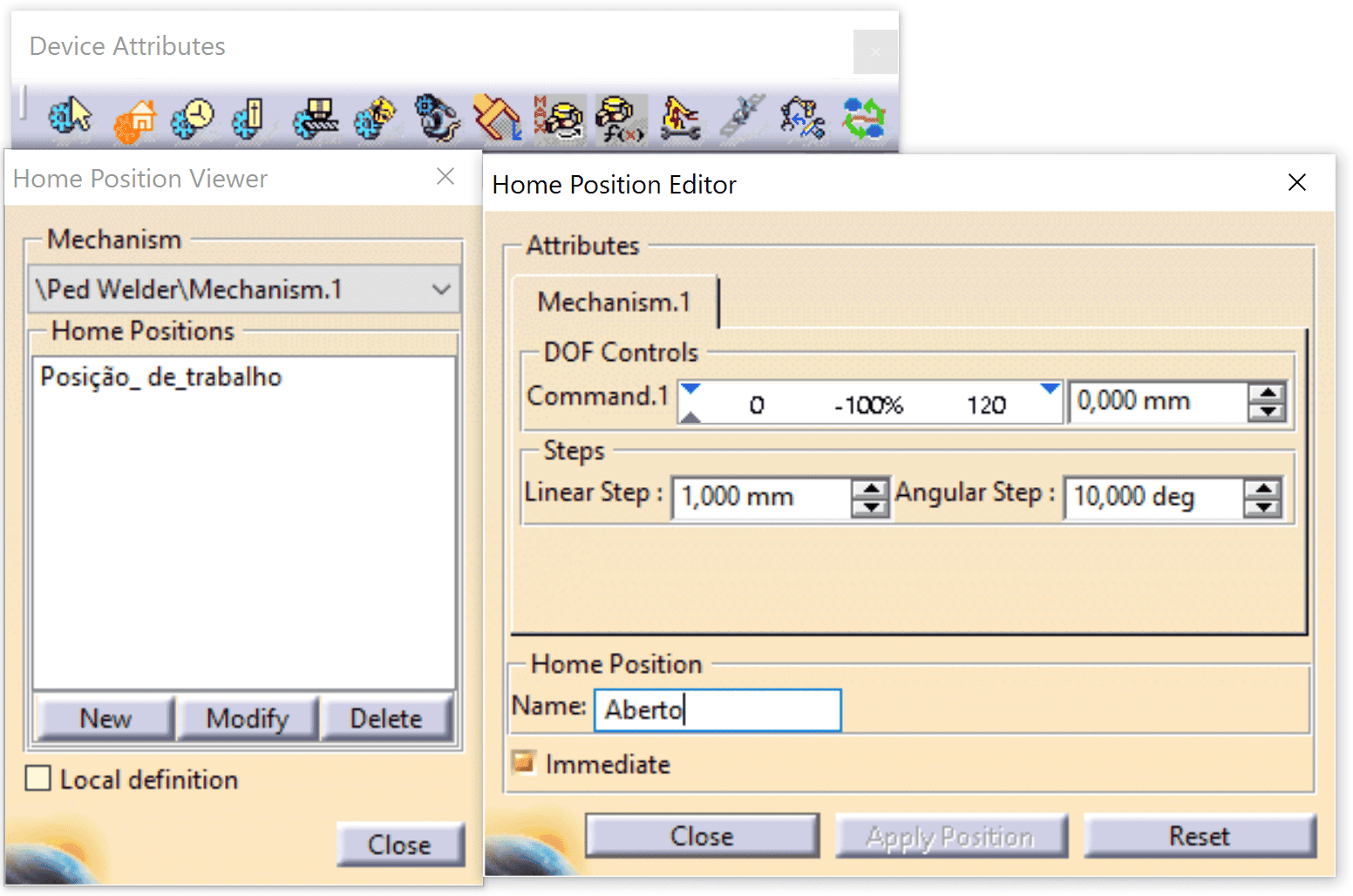
1- Clique no ícone HOME POSITION, que existe na toolbar DEVICE ATTRIBUTES
2- Então clique no botão NEW, e perceba que abrirá uma nova janela
3- Nessa janela você pode ajustar o valor dos comandos do mecanismo para a nova posição e definir um nome para essa condição.
4- Repita esses passos para as diversas posições necessárias para o mecanismo do sue dispositivo ou ferramenta.
Perceba que essas posições ficam armazenadas apenas na janela HOME POSTION VIEWER, e não na árvore, como item no mecanismo por exemplo.
Tendo criado as posições do seu mecanismo podemos utilizar a próxima ferramenta para criar tempos de movimentação entre essas posições para isso utilizaremos o comando TIME TABLE, basta seguir os seguintes passos:
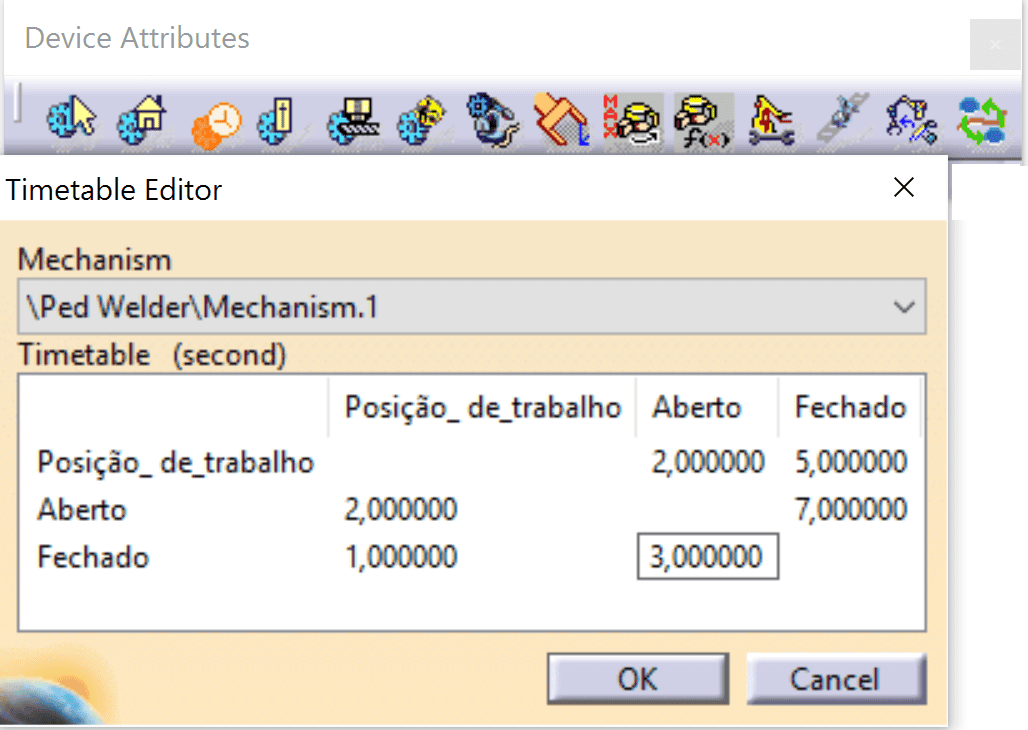
1- Clique na ferramenta TIME TABLE que está ao lado da ferramenta HOME POSITION, na mesma toolbar DEVICE ATTRIBUTES.
2- Essa ferramenta abrirá a janela TIMETABLE EDITOR, nela basta preencher a tabela contendo as posições nas linhas e colunas, clicando duas vezes pausadamente sobre a célula correspondente ao movimento entre duas posições e preenchendo o valor em segundos.
3- Clique em OK para os tempos serem mantidos
Tendo definido as posições e os valores de tempo de cada um dos movimentos basta salvar o .CATProduct pelo método convencional (lembrando que ainda precisará ter acesso a todos os arquivos para os quais ele mantém os links).
Dessa forma, se esse conjunto, contendo um mecanismo de uma ferramenta ou um dispositivo for inserido em .CATProcess, para simular um processo de manufatura, poderemos criar uma lógica para esse dispositivo utilizando workbenchs como WORKCELL SEQUENCING ou DEVICE TASK DEFINITION.
